Már tárgyaltuk, hogy a RoboCup esetében a feladat a megadott szimulációs környezetben intelligens (azaz focizni tudó) viselkedés kialakítása a játékos ágenseknél. Ezzel szemben a FerSML platformon feltesszük, hogy a játékosok már alapértelmezésben rendelkeznek a pálya és játék megfelelő belső reprezentációjával, tehát ennek kialakítása nem cél.
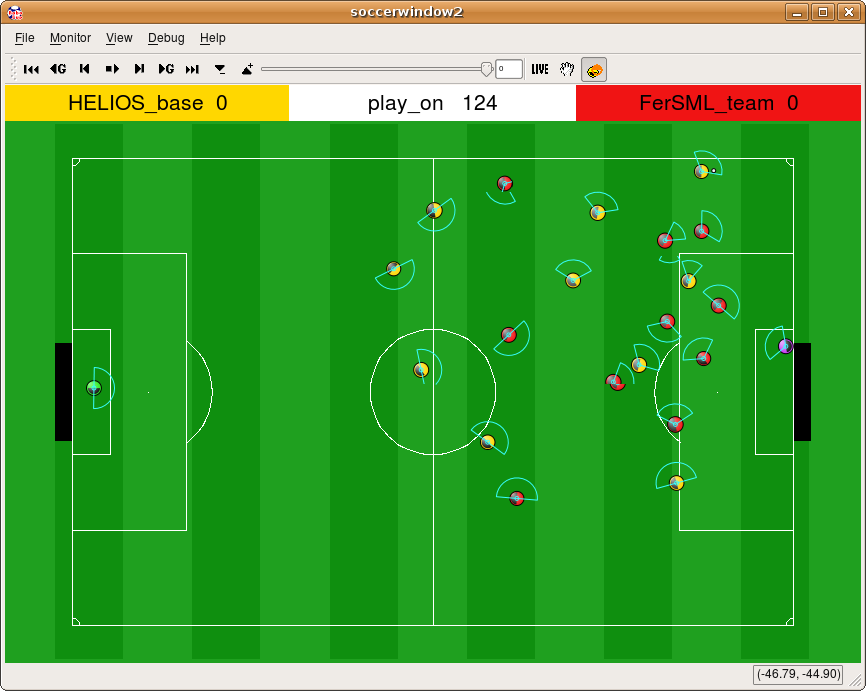
Ezért a FerSML platform szempontjából robotfoci csapat építése nem érdekes. A szerver oldal, vagy akár az egész protokoll módosítása viszont már megfontolandó lehet. Ezért és persze, mert végül is jó programozási móka ismerkedünk tovább a RoboCup platformmal. Azon belül is a világbajnok japán HELIOS csapat szoftvereivel. Ebben a posztban a soccerwindow2 alkalmazásukat nézzük majd meg.
Illetve elvben egy FerSML avatár 2 RoboCup foci ágens konverter írása is lehetséges lehet.